MRI-compatible grasp manipulandum for human and non-human primates
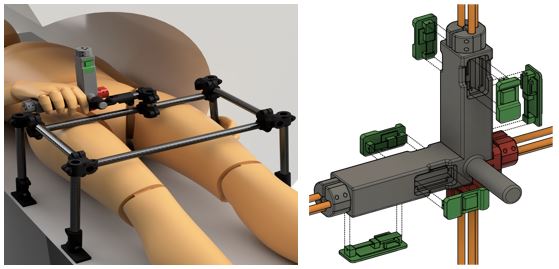
In diesem Seed-Fund-Projekt wurde ein MRT-kompatibles Greifmanipulandum gebaut und getestet, das es Menschen und nichtmenschlichen Primaten (NHPs) ermöglicht, Greifaufgaben innerhalb eines MRT-Scanners auszuführen. Das Manipulandum ist eine L-förmige, 3D-gedruckte Kunststoffstruktur mit MRT-kompatiblen Berührungsknöpfen, die entweder mit der ganzen Hand (Power Grip) oder nur mit 2 Fingern (Präzisionsgriff) gegriffen werden kann, wobei die Hand horizontal oder vertikal ausgerichtet sein kann. Das System ist computergesteuert und mit dem MRI-Datenerfassungssystem integriert. Es ermöglicht Forschern, die komplexe Rolle der Hirnareale zu untersuchen, die bei der Steuerung der Handbewegung sowohl bei Menschen als auch bei NHPs eine Rolle spielen, was die Lücke zwischen invasiven NHP- und humanen psychophysikalischen Experimenten schließt.
Projektleiter


Susann Boretius +49 551 3851-390 +49 551 3851-394 Kontakt