MRI-compatible grasp manipulandum for human and non-human primates
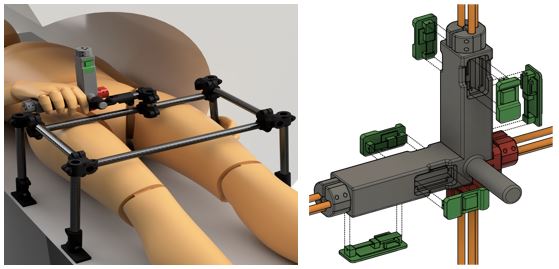
In this seed fund project, an MRI-compatible grasp manipulandum was built and tested that enables humans and non-human primates (NHPs) to perform grasping tasks inside an MRI scanner. The manipulandum is an L-shaped, 3D-printed plastic structure with MRI-compatible touch buttons that can be grasped either with the whole hand (power grip) or just 2 fingers (precision grip), and with the hand oriented horizontally or vertically. The system is computer-controlled and integrated with the MRI data acquisition system. It allows researchers to investigate the complex role of brain areas involved in hand movement control in both humans and NHPs, which bridges the gap between invasive NHP and human psychophysics experiments.