How does the reliability of social information affect retrospective effort judgments?
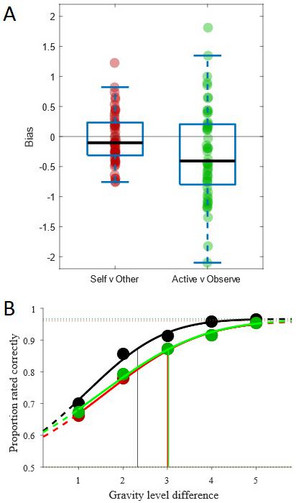
Figure provided by Caedyn Stinson.
The ability to accurately compare our own exerted effort with that of other individuals is an essential social skill. We often try to choose options that require less effort, and an imbalance in effort distribution within a social group can lead to undesirable consequences. However, our judgments of effort exerted by ourselves and others can be subject to bias.
In a previous work from our lab, we showed that this bias is due to less accurate information regarding how hard another person has worked. In the current study, we analyzed two potential mechanisms which could explain the asymmetric judgements of effort for self- versus others. The first mechanism holds that participants use different criteria to assess their own effort compared to those they use to assess their partners’ effort- a so-called bias of attribution (such as when we attribute our success to our higher effort but relate the success of others to their luck). The second mechanism we proposed was that of sensory information differences, where an individual has greater access to sensory information when they are actively performing a task compared to when they are simply observing another person.
To investigate this, we used a similar task as our previous study, where participants used alternating left and right keyboard presses to move a ball up a digital ramp against a simulated gravity of varying difficulty. Participants (n=53) performed this task across 3 conditions:
1. Physically performing the task (Self + Active)
2. Observing their own pre-recorded tasks (Self + Observe)
3. Observe a partner’s pre-recorded tasks (Other + Observe).
By having these 3 different conditions, we could identify and distinguish between any bias ascribed to the attributional bias (Self versus Other) or sensory based differences (Active versus Observe). We found that only the sensory differences of Active versus Observe trials explained the estimation bias of our participants, with the attributional biases of Self versus Other showing no significant effect (Fig 1A).To further investigate this mechanism, we also measured how accurate our participants were in the 3 different conditions. We found that participants had greater accuracy in Self + Active trials than in either of the Observe conditions (Fig 1B), suggesting that this relative accuracy difference between Active and Observe may be driving the bias ascribed to Active v Observe. These results indicate that biases in social judgements are largely driven by a lower accuracy in assessing the actions of other agents and therefore could be remedied by providing more objective information to decision makers.
